כלב רובוטי לניקוי חופים
שאריות של סיגריות נחשבות לפסולת השנייה הכי נפוצה בעולם. אנשים בכל העולם מעשנים שישה טריליון סיגריות בשנה, ולפי הערכות, ארבעה טריליון סיגריות נזרקות לרצפה. כל סיגריה כזאת מזהמת את הסביבה עם 700 כימיקליים מזהמים שנפלטים ממנה. הכימיקליים האלה נכנסים גם לגוף שלנו.
ניקיון הסביבה הוא אחד הגורמים החשובים והרלוונטיים ביותר לעתיד טוב ונקי יותר, אך נראה שלעולם לא נצליח להנחיל את ערכי הניקיון והדאגה לסביבה לכל אחד. זאת הייתה נקודת ההנחה של המיזם הרובוטי DLS (Dynamic Legged Systems, "מערכות דינמיות עם רגליים"), שהוא חלק מהמכון הטכנולוגי של איטליה (Italian Institute of Technology).
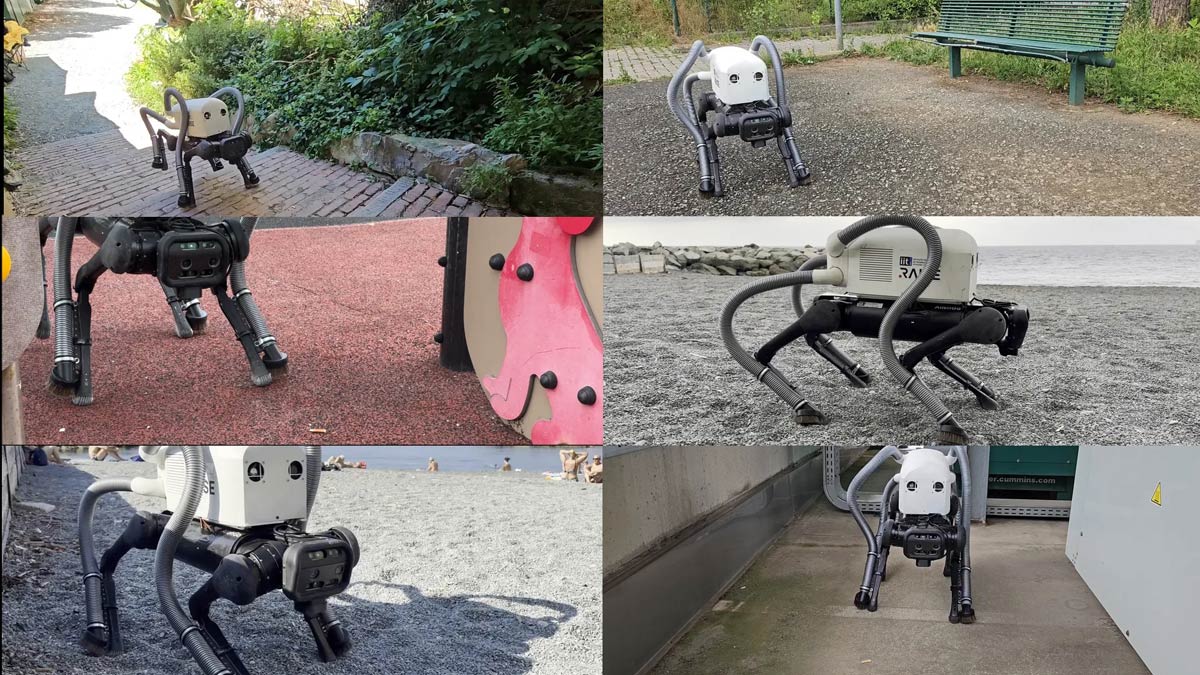
המיזם החליט לפתח מערכת רובוטית חדשה לניקוי הסביבה. ליתר דיוק, הפלטפורמה הרובוטית מנקה שאריות של סיגריות מחופי הים ומהרחובות. היא מגיעה בצורת רובוט עם ארבע רגליים, וכל רגל היא למעשה שואב אבק.
יש כמה דרכים אפקטיביות יותר לאוטומציה של ניקוי הסביבה, אבל לגבי ניקוי חופים, שרובם מכוסים חול, מתגלה בעיה: לרוב המערכות והרובוטים יש גלגלים, וכל האוטומציה שלהם תלויה בגלגלים. מערכות כאלו לא יעבדו כמו שצריך על הקרקע הרכה והחולית של חופי הים או בסביבות אורבניות עם הרבה מדרגות כגון בגנואה, העיר שממנה מגיע הרובוט החדש.
הרובוט, בשם VERO, פותח באחת המעבדות של מכון הטכנולוגיה האיטלקי. הוא מבוסס על הפלטפורמה האוטונומית AlienGo מבית יוניטרי (Unitree) ועל גבו שואב אבק. צינורות ניקוי המחוברים לשואב האבק מגיעים לרגלי הרובוט, עם זרבוביות שמיוצרות בהדפסה בתלת-ממד. דרך הצינורות שואב האבק הרובוטי מפעיל כמה שיותר לחץ על הקרקע תוך כדי שמירה על האיזון בשביל לא להתהפך מהמאמץ.
המבנה של שואב האבק אכן חדשני, אבל הפריצה האמיתית היא בדרך שבה הרובוט עובד. הוא מאתר שרידים של סיגריות ופסולת על הקרקע, ואז מקבל החלטה אוטונומית איך להפעיל את הרגליים שלו. בשלב ההפעלה הראשון, המשתמש מגדיר לרובוט את שטח העבודה שלו, ומשם המכשיר פועל לבד. הוא משתמש במצלמות שמותקנות עליו בשביל לאתר את הפסולת.