מערכת למיפוי סביבה על ידי רובוטים
חוקרים באוניברסיטת מסצ'וסטס (MIT) פיתחו מערכת בינה מלאכותית המאפשרת לרובוטים לייצר מפות תלת־ממד מדויקות של סביבות מורכבות בזמן אמת, תוך הערכת מיקומם העצמי במהלך תנועה. הפיתוח מיועד בעיקר למשימות הצלה באזורים מורכבים כגון מכרות שקרסו חלקית או מבנים פגועים, שבהם נדרשת יכולת לסרוק שטח נרחב במהירות ולעבד אלפי תמונות בתוך שניות.
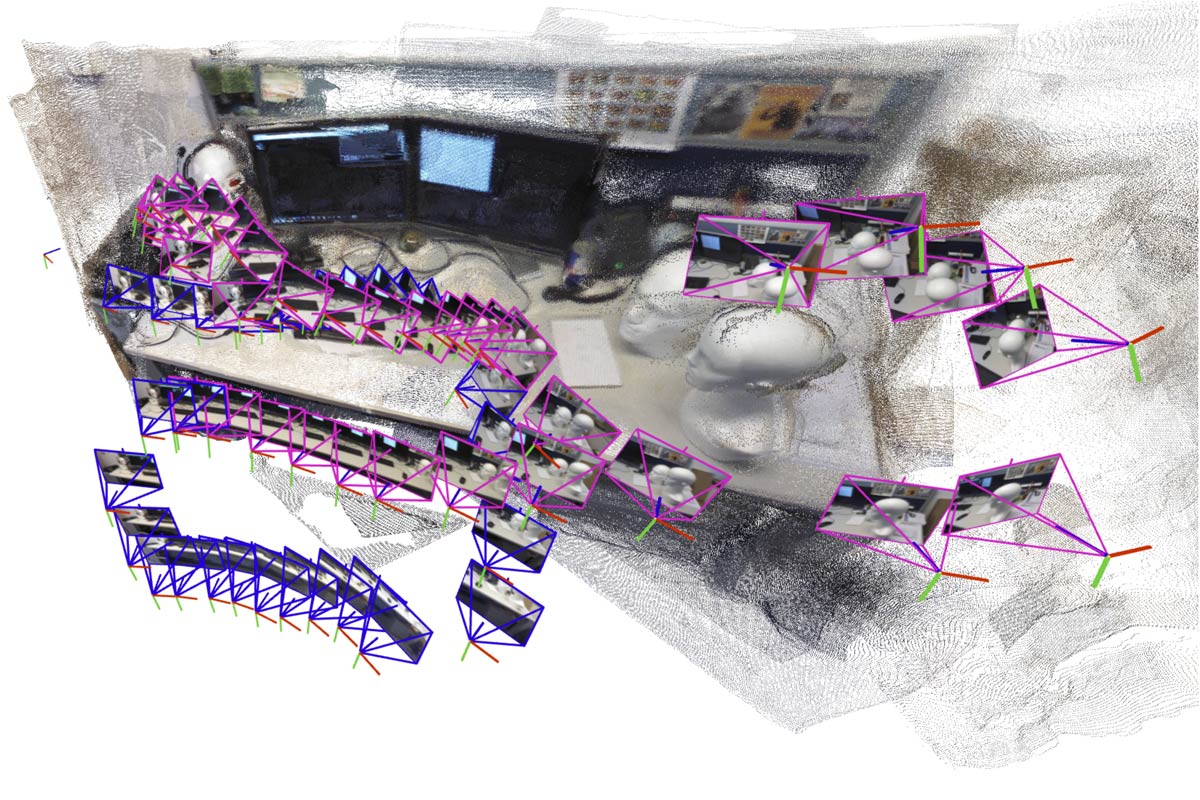
המערכת החדשה מתגברת על מגבלה מרכזית של מודלים קיימים: מרבית טכנולוגיות ה־AI מסוגלות לעבד רק מספר מצומצם של תמונות בכל פעם, ולכן אינן מתאימות למצבי אמת שבהם נדרשת כניסה מהירה לסביבה גדולה ומשתנה. החוקרים שילבו בין טכניקות למידה עמוקה לבין עקרונות קלסיים מראיית מכונה כדי ליצור שיטה שמחלקת את הסביבה למפות משנה קטנות ומרכיבה אותן למפת תלת־ממד מלאה ומדויקת בתוך שניות. כל תת־מפה מיוצרת מעיבוד של כמה תמונות בלבד, אך יכולת ה"הדבקה" בין המקטעים מאפשרת בנייה מהירה של זירת האירוע כולה.
בניגוד לשיטות המקובלות של מיפוי ואיתור (SLAM), שאינן יציבות בסביבות מורכבות ומצריכות שימוש במצלמות מכוילות, הגישה החדשה אינה זקוקה לכיול מוקדם או להתערבות של מומחה. אחד האתגרים העיקריים היה הטיפול בעיוותים שנוצרים בתתי־מפות עקב שיטות העיבוד של מודלי הראייה הממוחשבת. החוקרים מצאו כי רוטציות והזזות אינן מספיקות ליישור תתי־מפות, ולכן פיתחו טרנספורמציות מתקדמות המייצגות את כל סוגי העיוותים ומאפשרות התאמה מושלמת ביניהן. בזכות זאת אפשר לייצר מפות מדויקות גם כאשר חלק מהסביבה נסרק מזוויות קשות או בתנאים בעייתיים.
המערכת הדגימה ביצועים מהירים עם שגיאת מיפוי ממוצעת של פחות מחמישה ס"מ, והצליחה לבנות מודלים תלת־ממדיים של חללים מורכבים כגון מסדרונות עמוסים ואפילו חללי פנים של קמפוסים ב־MIT, באמצעות סרטונים קצרים שצולמו בטלפון נייד בלבד. החוקרים מציינים כי שילוב בין גיאומטריה קלסית למודלים מבוססי למידה איפשר להגיע לפתרון יעיל, מהיר וקל ליישום תעשייתי.
מעבר לשימושיות בתחום החילוץ, המערכת עשויה לשמש לפיתוח יישומי מציאות מורחבת למכשירים לבישים, לשיפור הניווט של רובוטים תעשייתיים במחסנים וליישומים עתידיים ברובוטיקה אוטונומית. הצוות מתכוון להמשיך בפיתוח המערכת, להרחיב את יציבותה בסביבות מורכבות במיוחד ולהטמיע אותה ברובוטים הפועלים בתנאי שטח אמיתיים.
המחקר נתמך על ידי הקרן הלאומית למדע של ארה"ב, משרד הצי האמריקני וקרן המחקר הלאומית של קוריאה.