רובוטיקה: הפרדה של רכיבי מחזור
צוות חוקרים במעבדה למדעי המחשב ובינה מלאכותית (CSAIL) פיתח מערכת רובוטית המסוגלת לזהות אם אובייקט הוא נייר, מתכת או פלסטיק.
מדי שנה חברות האשפה ממיינות 68 מיליון טון אשפה למיחזור, משקל שווה ערך ליותר מ-30 מיליון מכוניות. צעד מפתח בתהליך קורה בחגורות פס הייצור, כשעובדים צריכים למיין פריטים לקטגוריות כגון נייר, פלסטיק וזכוכית. מקומות עבודה אלו משעממים, מלוכלכים ולעיתים קרובות גם לא בטיחותיים, בייחוד במפעלים שבהם צריכים העובדים להפריד בין פסולת רגילה לפסולת המיועדת למיחזור. צוות חוקרים במעבדה למדעי המחשב ובינה מלאכותית (CSAIL) פיתח מערכת רובוטית המסוגלת לזהות אם אובייקט הוא נייר, מתכת או פלסטיק.
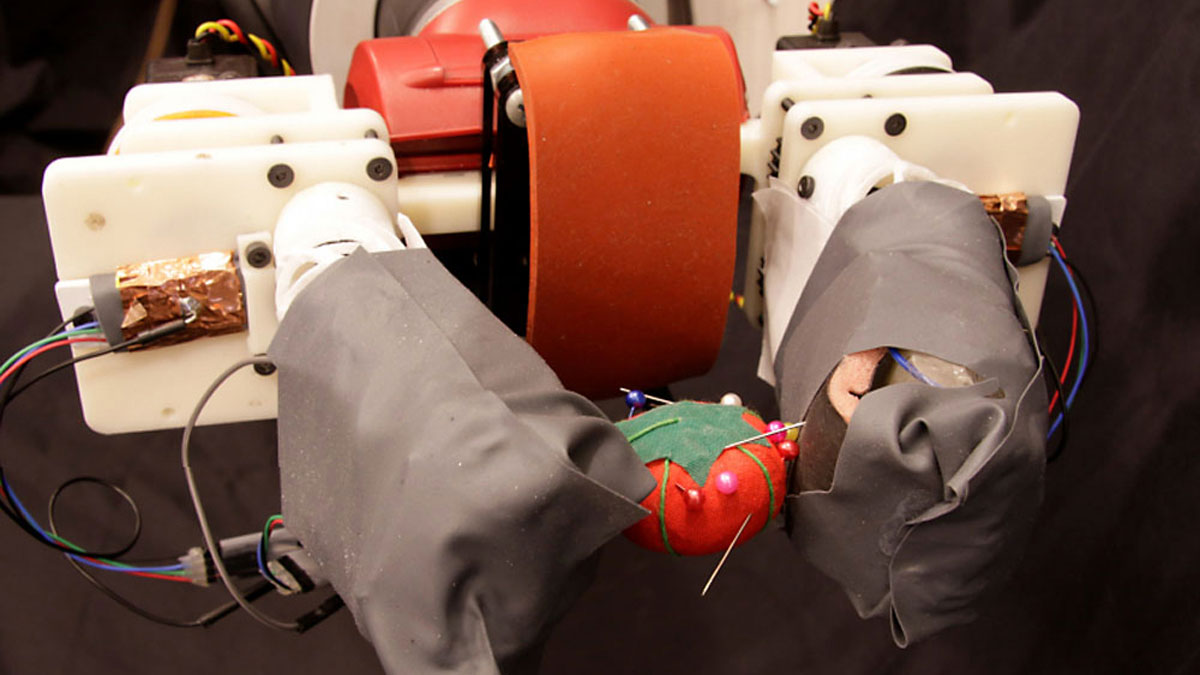
במערכת Rocycle נכללים יד טפלון רכה המשתמשת בחיישני מגע כדי לזהות את גודל האובייקט ונוקשותו. מערכת זו תואמת לכל יד רובוטית, ונמצאה מדויקת בזיהוי של 85% מהזמן כאשר החומר נייח ושל 63% כאשר החומר על פס הייצור. השגיאה הנפוצה ביותר הייתה בזיהוי של חומרי מתכת המכוסים נייר, ולדברי החוקרים אפשר לפתור זאת באמצעות חיישנים נוספים לאורך פני המגע. "העור החיישני של הרובוט מספק פידבק אשר מאפשר לו להבחין בין חומרים מסוגים שונים", אומרת פרופ' דניאלה רוס. "ויזואליזציה ממוחשבת לבדה לא תוכל לתת למכונות תפיסה דומה לזו שיש לבני אדם, לכן יש להשתמש בקלט של מישוש."
” צוות הפיתוח השתמש ביד מוטורית המוּנעת על ידי חומר חדש יחסית בשם Auxetics, המתרחב במשיכה. החוקרים יצרו סוג חדש של אוקסטיקס, שכאשר חותכים אותו הוא מתרחב לימין או לשמאל. מהשילוב הזה יצרו "יד שמאל" ו"יד ימין" “
באופן מפתיע, קשה לפתח מכונות המסוגלות להבחין בין נייר, פלסטיק ומתכת. ידי רובוט מסורתיות נוקשות, צריכות לדעת את מיקום האובייקט וגודלו, ואז לחשב נתיב תנועה מדויק. ידיים רכות, העשויות מחומר כגון גומי, גמישות יותר אך סובלות מבעיה אחרת. מכיוון שהן מופעלות על ידי כוחות נוזליים, יש להן מבנה דמוי בלון שיכול להתפנצ'ר בקלות.

כיצד עובד הרובוט
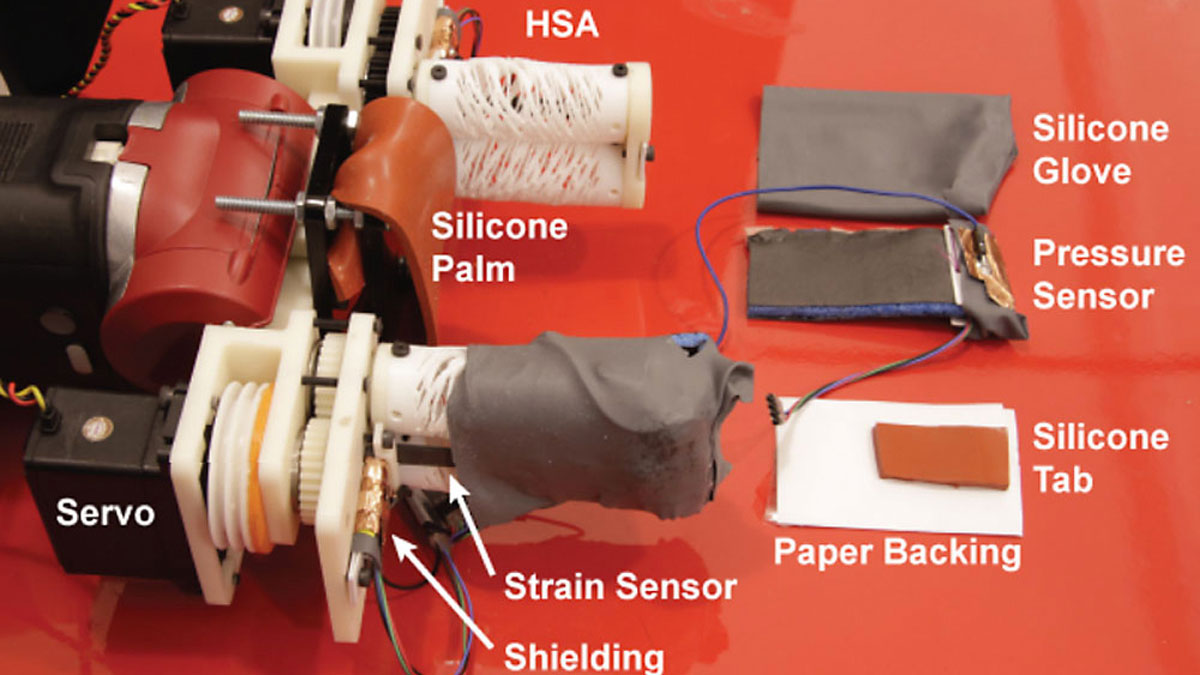
צוות הפיתוח השתמש ביד מוטורית המוּנעת על ידי חומר חדש יחסית בשם Auxetics, המתרחב במשיכה. החוקרים השתמשו בקונספט הזה עם טוויסט. הם יצרו סוג חדש של אוקסטיקס, שכאשר חותכים אותו הוא מתרחב לימין או לשמאל. מהשילוב הזה הם יצרו "יד שמאל" ו"יד ימין" לאצבעות הרובוט, וכך גרמו להן להיקשר ולהתנגד זו לרוטציה של זו. הדבר מאפשר תנועה דינמית יותר של האצבעות. החוקרים קראו לפעולה זו HSA (Handed Shearing Auxetics). "בשונה מרובוטים רכים, אשר המערכת שלהם מונעת מנוזלים ומצריכה משאבות אוויר ומדחסים, שיטת HSA משלבת פיתול עם הרחבה, כלומר אפשר להשתמש במנועים רגילים", אומר צ'ן, אחד החוקרים.
תחילה משתמשות ידי הרובוט ב"חיישן המתח" שלו כדי לאמוד את גודל האובייקט, ואז נעשה שימוש בשני חיישני הלחץ שלו כדי למדוד את הכוח הדרוש לתפיסת האובייקט. ערכים אלו, בשילוב עם נתוני כיול על אודות הגודל והנוקשות של החומר, הם אלו שנותנים לרובוט את המידע ממה עשוי האובייקט. מאחר שחיישני המישוש מוליכים גם הם, הם יכולים לזהות מתכת לפי השתנות האות החשמלי. "אנו מעריכים את הגודל ומודדים את ההבדל בלחץ בין היד הסגורה לבין היד הפתוחה הרגילה", אומר צ'ן. "אנו משתמשים בהבדל זה בלחץ כדי לסווג חפצים מסוימים בהתבסס על אובייקטים שכבר נמדדו."